M S C R I
Modular Solution for Corridor Reactive Installations -
MidTerm Presentation
New ElementsMay - 1st week -> physical interfaces
May - 3th week -> Adapt the software applications
Hardware
After the critique last session I focussed on the integration of the 5 elements that are going to be the components of the physical interface, it is going to be something like basic robotics:
* The support (Flexible material)
* The Motor (not anymore with a servo motor)
* The Wiring I/O (there is the new one - mini)
* The Camera (FireWire)
* The Ping Sensor (Ultrasound)
* The support. must be something flexible that will reacts easily to the motor vibration. I will follow the principles of the first robots by professor Rolf Pfeifer.
I got a ruler that is aluminum for one side and cork in the other. it is 60 cm.Rolf Pfeifer's first robots are a very important reference for this project because of the use of flexible materials.
Old Robot, with two motors. Artificial Intelligence Lab - Zurich University.
Robot with flexible materials. Artificial Intelligence Lab - Zurich University.
Robot with springs. Artificial Intelligence Lab - Zurich University.
Robot with springs. Artificial Intelligence Lab - Zurich University.
* The motor. I did several tests using the servo motors that I have -small futaba- but what I need is to create oscillation thanks to vibration now I understand that is miniature dc motor (like the ones inside the mobile phones) are a better option.
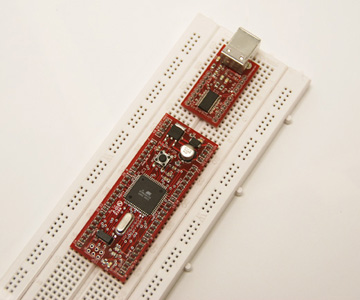
* The wiring I/O. For the structure that I have now in mind the board is a little big so, I just order and get the new wiring mini and because of its size is really more convenient.
Wiring Mini I/O board.* The Firewire Camera. The camera is working OK, but I am still looking for something smaller. The cable is specially inconvenient because is too thick.
* The Ping Sensor. Is just working fine, now is going to be attached to the camera.
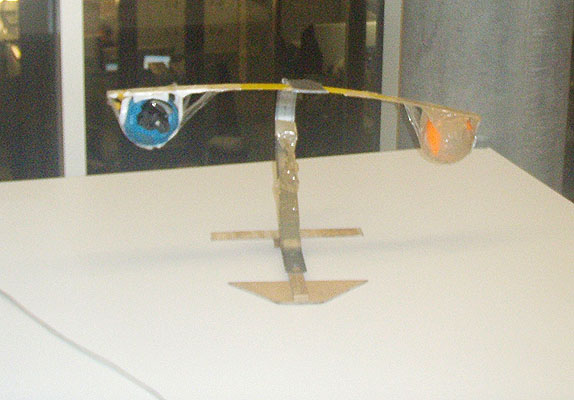


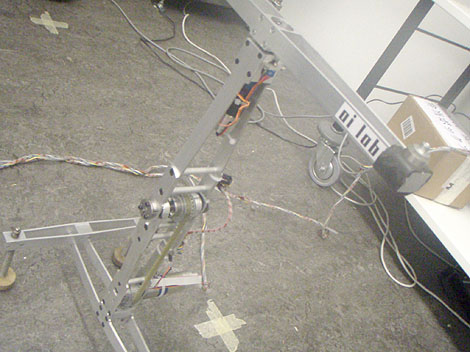



Physicall interface first results
Software
I did changes in the three examples that I rebuilt for the last session and also I did some basic examples to explain how the algorithms work, all of them are in work in progress:
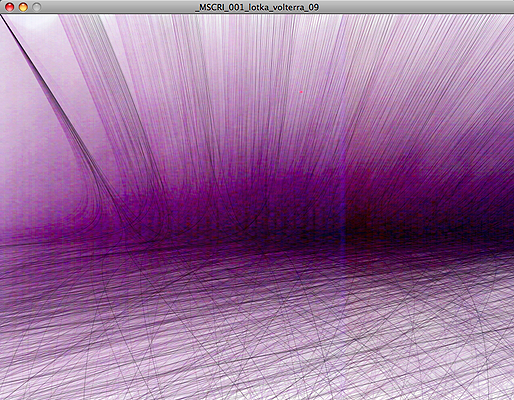
* Lotka-Volterra. In this example the main difference is that I started to work with bezier curves instead of lines looking for a more organic result.
Lotka Volterra - Algotithm Visulization.
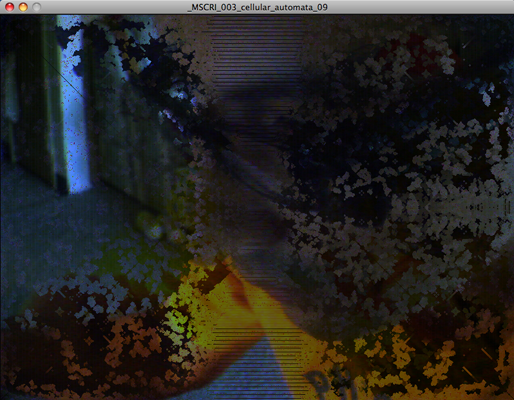
New example using Lotka Volterra Algotithm using bezier curves.* Cellular Automata. In this example , I started to work doing changes in the density level of the cellular automata. How many cells are set as starting points.
New example using Cellular Automata Algotithm changing the density of cells.* Physics. In this example I want to work now with lines instead of circles.
New example using basic physics equations.
Note
Probably the most important element that is emerging to be the central part of these exploration is the notion of oscillation, oscillation in the physical interface and oscillation in one of the processing examples that is the lotka volterra one.
References
The main references for this project are on the one hand the work done by Hans H Diebner, specially his works "quantum mirror" and "liquid perceptron".
And on the other hand in the works done by Rolf Pfeifer's Artificial Intelligence laboratory. Specially his first works in robotics, using economic equipment and flexible materials.
Schedule
May - 1st week -> physical interfaces
May - 3th week -> Adapt the software applications
June - 1st week -> Plan an exhibition in CNSI building.